
01、扇叶扫描系统优点
本系统主要用于(轴流-离心)风扇扇叶焊接所出的解决方案,相比之前使用寻位跟踪功能去焊接,有以下优势
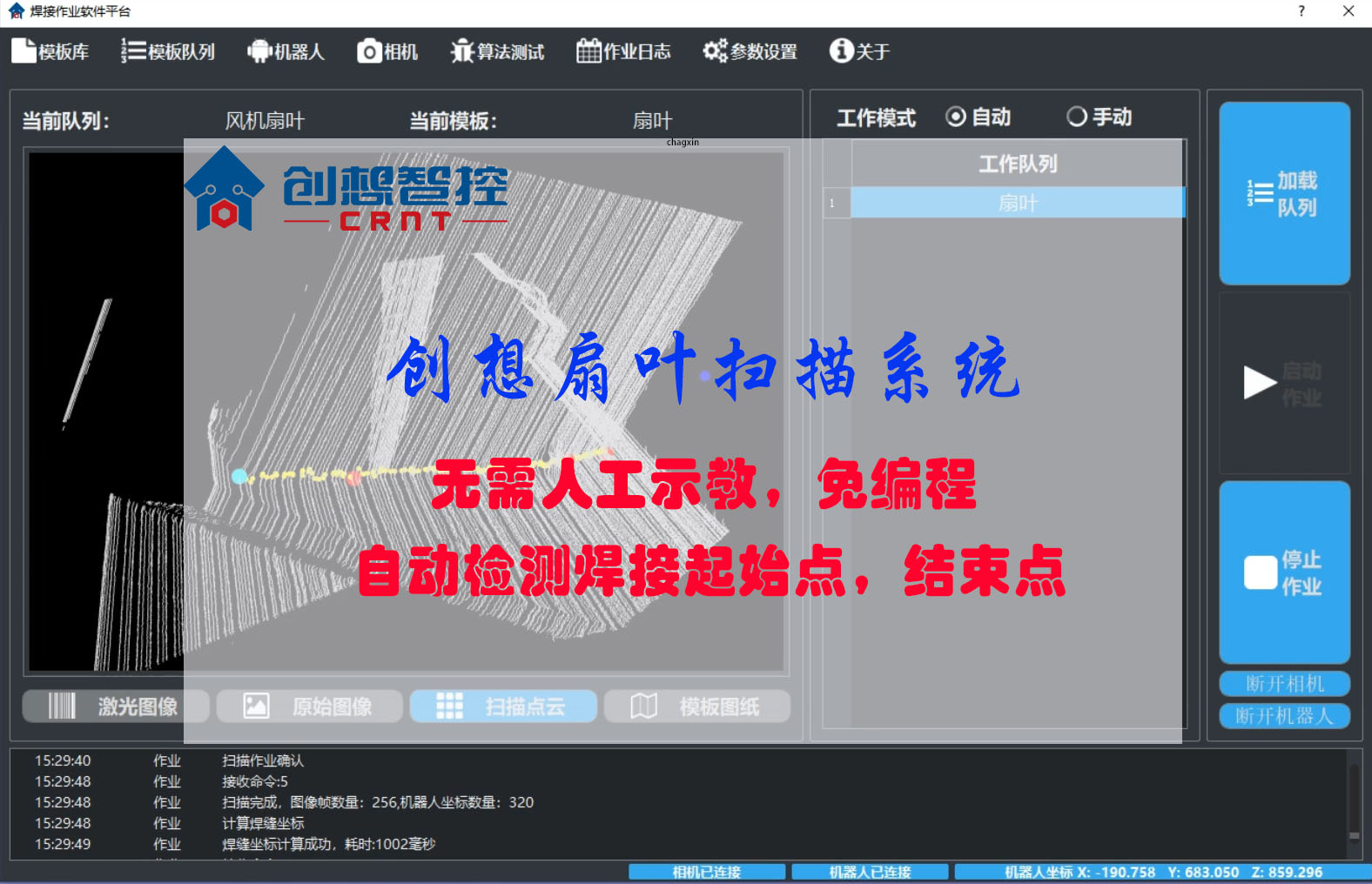
1、无示教,免编程,操作简单容易上手;
2、自动检测焊接起始点、结束点,实现满焊;
3、可实时查看3D扫描图像;
4、轴心式、离心式风机通用;
5、可通过偏移实现两面焊接;
6、不用考虑弧光的影响。
02、扇叶扫描系统解决的难题

风扇主要分为轴流和离心两种,随着工业产品的不断升级和高新科技产业的快速发展,离心风扇和轴流风扇在工业产品上的散热应用越来越广泛,离心式风扇原理:气流轴向流入旋转叶道,在离心力作用下被抛向叶轮外缘,从出风口排出。轴流风扇原理:气体轴向进入旋转叶道被加压后再从另一面轴向排出。
风扇的大量应用,让风扇焊接自动化加快了进程,但是采用主流的寻位跟踪焊接效率或质量并不尽如人意,如果采用寻位的方式,受扇叶弧度的影响,可能需要寻多个点位才可实行焊接,寻位焊接时间的周期,也会有比较长。如果采用跟踪的方式,不好示教调试干涉较多,存在焊点跟踪也不太稳定,他的一个焊接周期和最终一个效果,并不能达到客户要求。
03、扇叶扫描系统介绍
扇叶扫描主要基于研华宝元系统机器人,可以对轴流式-离心式扇叶进行扫描自动焊接。机器人配合高距离传感器,扫描出整条焊缝点云数据,再上传到工控机软件上,进行焊缝轨迹计算识别,并输出六个点位到机器人实行焊接,控制变位机可进行循环扫描焊接。
使用时主要需要对机器人示教扫描点位,并建立通讯后,即可直接自动运行程序连接上位机直接扫描焊接。

04、扇叶扫描系统使用流程
1、机器人和传感器通讯设置
2、机器人和传感器标定
3、导入程序模板,并设置参数
4、设置示教程序点位
5、自动运行程序,等待上位机启动指令
6、选择风扇模板焊缝
7、点击连接机器人和传感器
8、设置图像
9、其他设置-六点偏移
10、其他设置-双面焊接扇叶宽度输入
11、点击“启动作业按钮”










