
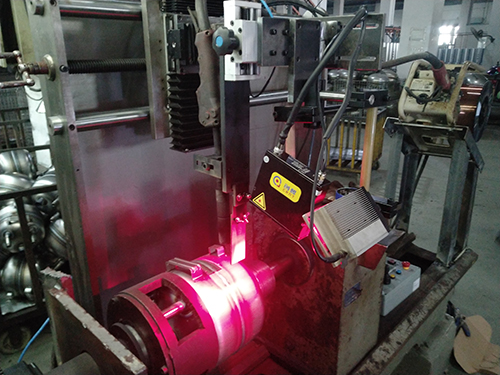
焊接是工业制造中伟大的发明,是生产制造不可获取的技术。焊接的过程就是控制热量或者热源作用到两块以上的材料上面,让这些材料形成一个完整的接头。比如,针对电弧焊来讲,焊接作业就是人、机器人或者专用把持焊枪,按照一定速度沿着焊缝运动,同时按照一定的工艺参数施加热源能量。除了正确的工艺参数,焊枪能否精准的跟踪焊缝是保证焊接质量的重要手段。
在诸多焊接过程信息传感方法中,视觉方法是当前公认的信息量最大、效果最好的传感方法。早在20世纪80年代初,国内外的很多研究人员就已开始研究视觉传感方法,包括以电弧光为光源的被动视觉传感和采用激光辅助照明的主动视觉传感。被动视觉方法中,电弧本身就是监测位置,没有因热变形等因素所引起的超前检测误差,能够直接获取焊缝接头和熔池的信息,有利于焊接质量的自适应控制。然而,直接观测易受到电弧的严重干扰,至今还没有成熟的工业应用的报道。因而,主动光视觉特别是基于激光三角测量原理的结构光或扫描方法已成为目前焊接工业应用中主要的视觉传感方法。激光视觉传感的最大特点是能够获取焊缝截面的精确几何形状和空间位置的信息,适合实时焊缝跟踪和自适应工艺参数控制。
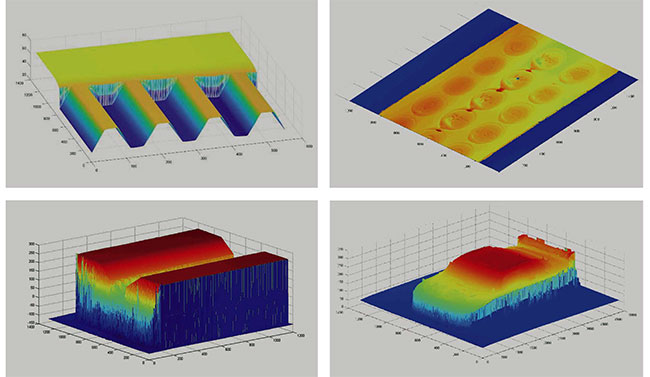
激光视觉传感的基本原理就是光学的三角测量原理。激光束照射到目标物体的表面,形成一个光斑点,经过摄像头上的透镜在光敏探测器上产生一个像点。由于激光器与摄像头的相对位置是固定的,当激光传感器与目标物体的距离发生变化时,光敏探测器上的像点位置也相应发生变化,所以根据物像的三角形关系可以计算出高度的变化,即测量了高度变化。当激光束以一定的形状扫描(扫描方式)或通过光学器件变换以光面的形式在目标物体的表面投射出线形或其他几何形状的条纹(结构光方式),在面阵的光敏探测器上就可以得到表征目标截面的激光条纹图像,而当激光传感器沿着物体表面扫描前进时,就能得到所扫描表面形状的轮廓信息。所获得的信息可用于焊缝搜索定位、焊缝跟踪、自适应焊接参数控制、焊缝成形检测等。
目前,已在焊接中应用的激光视觉传感器主要有扫描和结构光两种形式。扫描方式主要有线形扫描和圆形扫描,其中圆形扫描的图像处理方式要复杂一些。相对而言,对于反光的处理,扫描方式比结构光方式要容易。此外,扫描方式传感器的视场深度大,但受到扫描激光斑点的影响,扫描激光传感器的精度,尤其是横向分辨率相对较低。同时,受机械扫描的影响,扫描速度不高。扫描式激光传感器大多只用于大厚度工件的焊缝跟踪和自适应控制。在高精度和高速度跟踪或检测中应用的激光视觉传感器大多为结构光方式的传感器。










