
中厚板在工程机械、矿山机械、造船、航空航天、桥梁、铁路车辆、煤炭机械、建筑钢结构、机床和风电等领域有广泛的应用。随着国内大型项目的开展,如南水北调、西气东输、高铁和高速公路的建设,市场对装备制造的需求是越来越多。
装备制造离不开焊接,焊接在中厚板加工中的价值体现尤为明显,精准、稳定、高效的焊接是保证生产质量的重要因素。
以工业焊接机器人为代表的自动化设备近几年发展飞速,其成效尤为突出。焊接机器人的应用推广带来很多的优点,降低了焊接这种有害工种对操作者的伤害,提高了操作者使用先进设备的技能、生产效率、焊接质量等。
在自动化生产焊接过程中,由于焊接机器人多采用“示教再现”的工作模式,要求工件和卡具非常精确,针对一般加工有偏差的工件,多会发生焊接不良、产品报废的情况。而通过基于工业视觉的焊缝跟踪技术对焊接点位、轨迹进行实时定位和矫正,可以有效改善上述问题。由于焊接工作环境非常恶劣,包括烟尘、弧光、金属飞溅等,采用强穿透性的激光视觉是目前较好的解决方案。
中厚板焊接中的实践总结
1、智能寻位
在中厚板焊接中,对工件焊道焊缝进行寻位
2、沟槽寻位
在智能寻位的基础上,焊枪针对沟槽进行寻位获得位置及尺寸
3、电弧跟踪
焊接时要实现弧焊控制跟踪启动,固定焊接起始点
4、多层焊接
广泛应用于中厚板焊接中
5、摆动焊接
是填充中厚板宽缝焊道的重要手段,焊枪摆动功能启动,原点摆动。
6、编程规范
编写规范的焊接程序。在焊接文件中插入寻位程序,。对每条焊缝在焊接前进行寻位
7、机器人姿势
调整机器人运动姿势,方式机器人运动中发生碰撞或者进入运动死点,保证焊接工艺的合格与美观。机器人在行走每一条焊缝之前应当把机器人调整到合理的姿态和位置。调整焊枪尽量使焊枪在焊接中姿态变化大不大
厚板焊接变形与焊接应力的控制
在焊接过程中,厚板对接焊后的变形主要是角变形。实际生产中,为控制变形,往往先焊正面的一部分焊道,翻转工件,碳刨清根后焊反面的焊道,再翻转工件,这样如此往复。一般来说,每次翻身焊接三至五道后即可翻身,直至焊满正面的各道焊缝。同时在施焊时要随时观察其角变形情况,注意随时准备翻身焊接,以尽可能地减少焊接变形及焊缝内应力。另外,设置胎模夹具,对构件进行约束来控制变形,此类方法一般适用于异形厚板结构,由于厚板异形结构造型奇特、断面、截面尺寸各异,在自由状态下,尺寸精度难以保证,这就需要根据构件的形状,制作胎模夹具,将构件处于固定的状态下进行装配、定位、焊接,进而来控制焊接变形。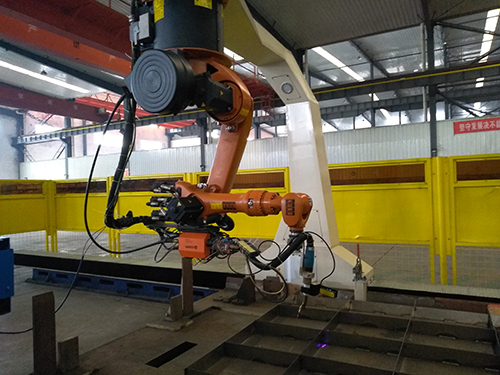
选择与控制合理的焊接顺序,即是防止焊接应力的有效措施,亦是防止焊接变形的最有效的方法之一。根据不同的焊接方法,制定不同的焊接顺序,埋弧焊一般采用逆向法、退步法;CO2气体保护焊及手工焊采用对称法、分散均匀法;编制合理的焊接顺序的方针是“分散、对称、均匀、减小拘束度”。
对于厚度较大的焊件,一般都应采用多层焊。每层焊缝的厚度对焊缝质量和焊接应力的大小有着一定的影响。对于低碳钢和强度等级低的普通低合金钢,如果每层焊缝厚度过厚,会引起结构变形增大,对焊缝金属的塑性稍有不利影响。
由北京创想智控自主研发的、具有多项专利的激光焊缝跟踪系统通过复杂的程序算法完成焊缝的在线实时检测,非接触式跟踪,通过传感器测量焊缝偏移,引导并控制焊枪进行定位。具有焊缝成形美观,质量可靠,产品合格率高,劳动强度低和生产效率高等优点,大大提高企业的生产效率。










