
焊接机器人完全替代人工焊接为时过早,但焊接机器人替代批量焊接作业中90%的焊工,这一目标完全可以实现。焊接机器人以其高效率、高质量、易于管理等特点受到越来越多中小企业的青睐。对于一些要求高精度的产品,单靠焊接机器人是无法解决的,这时就需要用户及时增加自动化焊缝跟踪定位系统。
焊接机器人配置焊缝跟踪系统的重要性
1:焊接机器人在焊接生产过程中常遇到工件夹紧偏差、钣金件热变形等各种技术情况。此外焊接机器人经常需要在焊接后进行手工补焊,对于中小企业来说,不仅增加了人工成本,而且提高了产品的返修率。
2:工件进料改善成本较高:对原有工艺的加工设备进行更新,高精密工装的设计与采购。
3:用户实际生产情况:焊接产品品种多,批量小,对焊接精度和焊接技术人员要求高。
为了提高焊接机器人的加工效率,减少教学时间和难度,解决焊缝跟踪的位置迫在眉睫。
什么是焊接机器人的焊缝跟踪和焊接定位?
严格意义上讲,焊接机器人的焊缝跟踪定位系统由两部分组成:在焊接前通过焊缝定位功能检查缝隙是否合适,并准确到达待焊接的接头。焊缝实时跟踪,焊接过程中产品变形监测。
焊缝跟踪:意味着一个光学传感器安装在焊接位置数据收集前,通过电源或焊接参数收集,然后传播到焊接机器人和各种自适应模糊控制算法用于正确的焊接机器人轨迹或专机,从而实现自适应控制,实现实时焊缝跟踪。
焊接定位:通过移动焊接机器人或编辑机器程序路径,使用一次或多次搜索来确定要焊接的焊缝位置的过程。
如何实现焊接机器人焊缝跟踪定位?
实现焊接机器人焊缝跟踪定位的方法有很多种。其中常用的有两种:外围辅助检测和自检测。
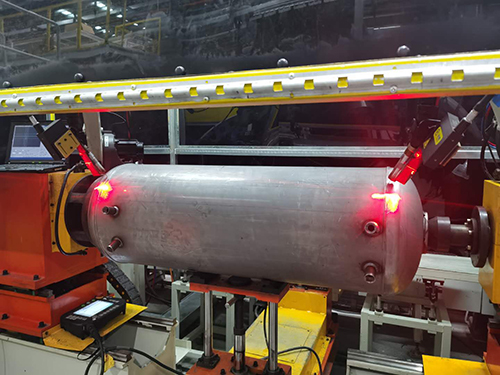
外围辅助检测:激光跟踪、摄影成像跟踪。这种焊缝跟踪寻位控制系统可以通过光学测量设备采集焊缝相关数据,焊接机器人可以通过数据对比调整自适应臂的运动轨迹,从而实现对焊缝的实时跟踪。
自检测:对焊丝进行传感检测,实时检测焊接参数。
焊接机器人焊缝跟踪定位的实现方法
焊接机器人焊缝跟踪定位的实现方法各有优点
1:实时焊缝检测方法:焊接产品的焊接方法为气体保护焊和角焊或搭接焊(板厚大于3mm)。焊缝跟踪的质量与焊接机器人的控制算法和匹配的弧焊电源有着密切的关系。因此该方案的优点如下:
① 任何外围设备
② 可降低成本:降低检测设备成本应认真考虑实际成本,但焊接机器人本体和机器人焊接设备会增加相应的成本
③ 适用的焊接生产环境有很大的局限性
2:激光焊缝跟踪是目前市场首选的成熟可靠的控制方法
① 不受焊接工艺、方法和焊接环境的限制
② 外围设备+焊接机器人
③ 增加外围硬件成本










