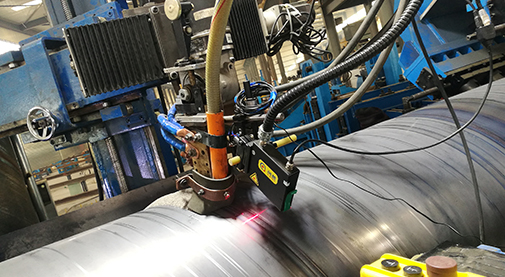
激光位移传感器将扫描的图像和当前位置信息传输给工控机,经过工控机运算自动规划出机器人运动轨迹,然后传输给机器人运动焊接。实现机器人无示教运动焊接。
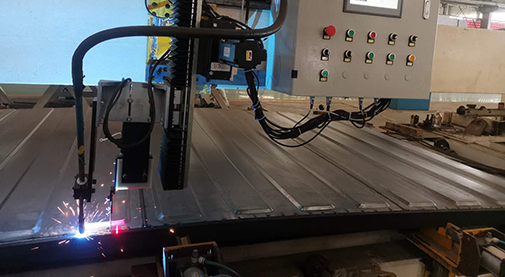
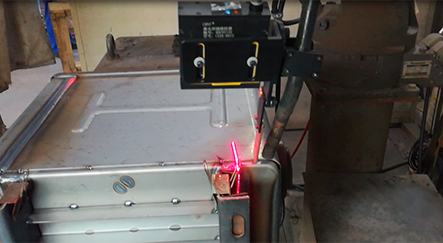
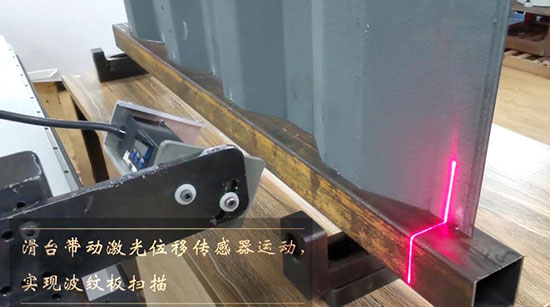
滑台带动激光位移传感器运动,实现波纹板扫描。
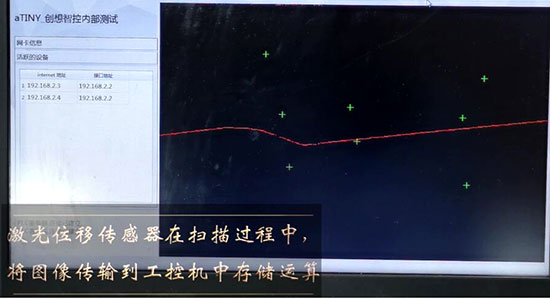
激光位移传感器在扫描过程中,将图像传输到工控机中存储运算。
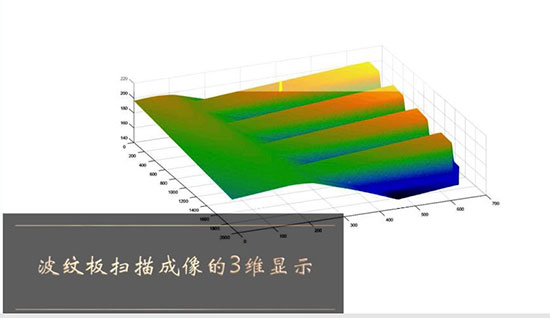
波纹板扫描成像的3维显示。
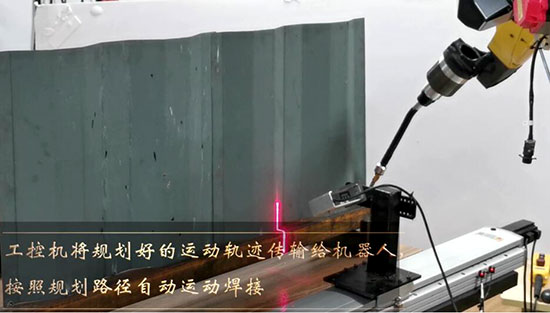
工控机将规划好的运动轨迹传输给机器人,按照规划路径自动运动焊接。
焊缝扫描系统可以安装在机器人上或在外部轴上,对需要焊接的工件进行扫描,自动生成轨迹,实时发送给机器人,实现了机器人免示教的智能系统。可应用在焊接、涂胶、分拣等行业。
小体积,减少干涉;
无需人工示教编程;
支持边扫描边变姿态焊接;
自动检测焊缝起始点、终止点。
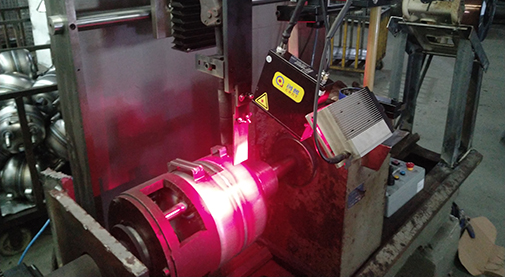
适用于复杂异形工件焊接,如:扇叶、波纹板等复杂工件的扫描。