
了解焊缝跟踪技术意味着了解各种可能的智能解决方案。根据您的焊接工艺、材料和周期时间需求,正确的解决方案通常会随着时间的推移而出现。
但您了解所有可用的焊缝跟踪解决方案吗?
或者了解其中一项吗?
所有不同的焊缝跟踪解决方案有哪些优点和缺点?
根据我的焊接情况,哪些焊缝跟踪解决方案是不适合我的?
传感器技术为您的焊接操作提供了很多可能性。有些是低成本和有限的能力,有些涉及大量投资和周到的设计 - 具有巨大的优势是节省成本。
触摸感应在机器人向焊接喷嘴或焊丝施加少量电压的地方。它们的功能相同,唯一的区别在于每种方法将数据转换为机器人的方式。通过电压,机器人将上升到工作材料,触摸它,发生短路,然后机器人将记录该记录值所在的位置并告诉机器人表面的位置。大多数情况下每个关节需要至少2次触摸才能找到位置 - 垂直和水平表面。机器人将连接这些搜索向量并三角测量焊接接头的位置。
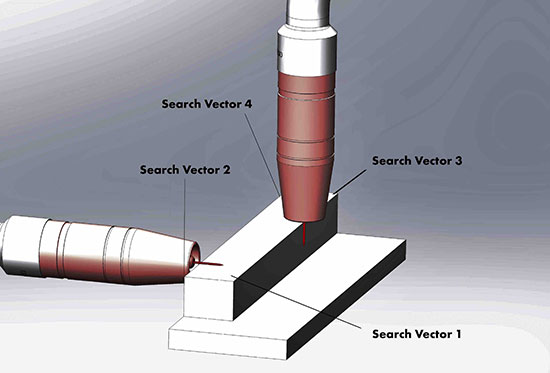
在角落或外侧边缘关节处,通常需要来自机器人的第三次触摸以获得所有正确位置以允许机器人找到并“跟踪”关节。
触摸传感作为低成本的联合跟踪解决方案非常有用。这是一个简单的基于软件的解决方案,您可以在没有附加系统的情况下从示教器中应用。触摸感应的另一个主要好处是,您可以进入狭窄区域,因为除了机器人割炬喷嘴阻止接触到的接头之外,没有其他硬件。
然而,触摸传感确实有一些局限性,使其成为关节感应和焊缝跟踪的一种非常有效的解决方案。第一个是触摸感应是一个缓慢的过程,每个搜索向量增加3到5秒。因此,如果您在2D零件上进行触摸感应,则可能会在焊接周期中添加6到10秒,如果您触摸感应3D零件,则每个弧开始的周期时间增加15秒。
弧端具有触摸感测的故障点的数量也远远大于其他解决方案。弯曲的线材或脏的和鳞片状的材料使得难以始终如一地进行触摸感测。触摸感应仅用于找到电弧起点或电弧端,并且无助于焊缝长度的零件差异,因此不会补偿零件的不一致夹具或工具。
触摸感应也受到焊接接头类型的限制。圆角和搭接接头是最常见和推荐的接头,但即使是搭接接头,也必须考虑材料厚度。小于5毫米(1/4英寸)的任何东西都可能成为执行触摸感应的问题,因为导线可能会错过上板的材料厚度 - 导致您超出部件,或者您可以击中下板并获得读错的数值。
您的机器人焊枪还需要一个电线制动器和一个配备在割炬包装中的线切割器,以便在远离尖端的已知距离处切割电线,这样您的读数在整个过程中都是一致的。
触摸感应还需要清洁的边缘,因为定位焊接或修剪不良的部件会产生错误的读数。
Through Arc Seam Tracking(TAST),是您应用触摸感应的第二阶段。触摸感应后,您会找到弧形起点和弧形终点,然后应用“Through Arc Seam Tracking”。TAST可以跟踪关节的Z轴和Y轴,非常适合较厚的材料。
TAST需要编织过程。当导线从接头的一侧过渡到另一侧时,电压正在变化。这是因为导线的伸出量随着尖端到工作距离的变化而减小。这允许机器人解释电压的变化并调整示教路径,从而在接头中保持适当的焊接位置。
TAST适用于较厚的材料搭接接头,需要5毫米(1/4英寸)或更厚才能保持稳定。不建议以较低的厚度进行TAST(事实上,我在我工作的这些年里从未目睹过它使用焊缝跟踪应用程序),否则您可能会冒险进行蠕虫跟踪或蜿蜒焊接 - 这会降低整个过程中焊缝的完整性。
之所以在整个焊接过程中不建议使用较薄的材料,并且倾向于清洗或移除上板的肩部。这种清洗不会导致显着的电压变化,从而导致机器人进行搜索 - 这就是蠕虫风险发挥作用的地方。
TAST的另一个限制是你必须增加周期时间,因为它需要机器人穿过关节。通常,TAST的行驶速度限制在每分钟35-50英寸。TAST同样仅限于MIG应用程序 - TIG或Plasma不可能实现。
最后,TAST仅限于用于温和或不锈钢。电压与铝不够一致,无法可靠地进行TAST。材料的条件也很重要。零件清洁度,比例或生锈对参数组有影响,因为您设置了电压变化所需的标准。因此,由于金属上的氧化皮或铁锈而在负Y上的2%电压变化将导致TAST的不一致特性。
由于机器人必须焊接以跟踪,因此TAST也无法进行干运行。粘性同样存在问题,因为当你越过大头钉时,伸出的东西会发生变化,因此机器人会失去跟踪,直到它从定位焊缝的另一侧出来。
想象像相机一样的2D视觉。它在撞击弧之前获取理想部件的参考图像,并将参考图像与每个新的后续部件匹配 - 检测任何偏移并调整焊接路径。它仅提供黑白图像,其中图像位于其表面上。2D不能确定高度或深度,并且不被认为是焊缝跟踪的可靠过程。
V型接头和搭接接头等接头对于2D Vision来说非常成问题,因为它无法确定这些类型焊接接头的深度。像铝这样的光泽材料对于2D系统也是有问题的。通常,2D用于识别部件而不是跟踪。它是一种基于视觉的系统,因此外部光线干扰对光学元件的性能至关重要。此外,相机镜头对焊接飞溅和弧光的损坏很敏感。
触觉是一种接触材料的物理接触探针。触觉通常用于硬自动化和一些激光钎焊应用,而不是用于6轴机器人的焊缝跟踪应用。它在焊接接头内部安装一个尖端或探针,并检测与其接触的边缘和原始源的偏差,并相应地调整它的十字滑块,以便在焊缝上正确定位。
触觉焊缝跟踪具有非常简单的操作功能,可应用于各种过程,包括子弧、开弧和钎焊,这使其成为一种非常通用的焊缝跟踪形式。触觉也不受任何材料的限制,因此您可以触摸接缝,从不锈钢到铝材料,不会对系统产生任何影响。
维护是保持触觉跟踪系统正常工作的重要部分。由于尖端与接合表面持续接触,因此部件的磨损经常发生在触觉系统中。当其尖端磨损并变短时,它会使你的焊接工具向前靠近接头,这会导致焊接不良或完全损坏割炬的前端。检查探头是否磨损非常重要,以确保探头正确脱离割炬,以获得高质量的焊接。
触觉解决方案比非接触式解决方案,应更频繁地检查和维护的其他项目,如焊接飞溅和电缆管理等条件。
触觉焊缝跟踪解决方案也不适用于钉焊接。如同通常所推荐的那样,钉可以将探针提升到定位焊上并沿相同的方向引导电弧,而不是让焊炬焊接通过大头钉。
触觉焊缝跟踪也不适用自适应。这些类型的系统遵循关节线,并且不考虑因工具而导致的不匹配或间隙尺寸。面积计算也是不可能的。一个触觉探针将锁定在一个凹槽中,并以极少的偏差跟随它。凹槽中的足够大的变化或足够大的点焊可以使探针脱离其所需的轨道。
像对接焊缝这样的焊接型材难以在没有间隙的情况下进行触觉焊缝跟踪。非线性焊接迫使探头沿一个方向急剧移动对触觉接缝跟踪应用来说并不理想;它适用于大型圆柱焊接或管道焊接。
行进速度是触觉焊缝跟踪的另一个限制,因为它通常以较低的速度移动,这会减慢您的周期时间。
比较触觉与基于视觉的焊缝跟踪是一个基于接触的方法和另一个非接触的问题。虽然触觉焊缝跟踪是一种机械设置,但它通常是较低的前期资本投资,开放式和次级弧应用中的触觉式跟踪系统需要更多的维护,因为它是一种机械过程,长期可以使其成为一种成本效益较低的解决方案。测量体的灵敏度和元件的持续磨损。
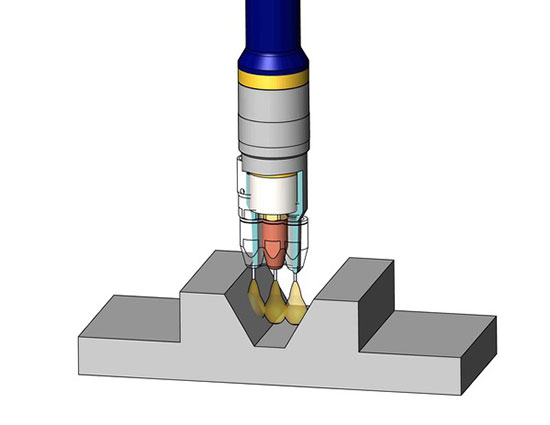
3D激光焊缝跟踪系统也称为光学或视觉接缝跟踪,使用激光三角测量原理。激光焊缝跟踪系统能够在硬件自动化和机器人系统上使用,并且可以使用正确的软件包。

从概念上讲,激光焊缝跟踪涉及从设备射出的激光束,撞击表面,从表面反射,反弹回传感器,并且传感器拾取光束撞击的位置。因此,通过激光焊缝跟踪,传感器可以知道激光发射器与相机上的传感器之间的距离,从而可以对其弹回的材料进行三角测量。
从本质上讲,您可以获得关节的Z(高度)和Y(横向)的图像,因此传感器知道它从远离传感器光线的X(距离)尺寸反弹的图像,以及它的特征在Y方向的视野中选择是正的还是负的。
激光焊缝跟踪不知道X方向或部件的长度。这就是您将设备与控制系统配合使用的原因,控制系统定义了X值 - 称为校准的过程。校准后,焊缝跟踪系统会在整个焊接过程中识别X,Y和Z位置。
焊接过程的任何焊缝跟踪解决方案都会增加周期时间,但激光焊缝跟踪增加的周期时间最少 - 通常每次扫描的焊接周期大约为四分之一秒。它也可以移动最快。光学跟踪可以达到每分钟200英寸,因此如果需要高行进速度,它不会限制机器人或龙门架速度。激光焊缝跟踪也可用于焊接之外的过程,如涂胶、喷涂和打磨等。
激光比TAST具有独特的优势,因为它允许设备在部件上干燥运行或离线查看。由于跟踪仅基于部件的成像,因此诸如生锈、刻度或甚至大头钉之类的材料不一致对激光焊缝跟踪几乎没有影响。
激光焊缝跟踪的间隙是一个限制。行进方向是另一个考虑因素,因为传感器必须始终引导焊接路径。这可能导致机器人到达问题、割炬角度问题,并且必须仔细考虑部件的工具和设计。
通常,激光焊缝跟踪唯一难以适用的是有光泽的材料。原因在于,无论何时从材料发射激光,它都必须反射。考虑不同的焊接接头类型以及它们如何根据材料反射激光束。在膝关节中,它直接反射回来。如果它是一个V型关节,它不仅会反射直背,而且会反射它所反射的相反角度 - 几乎就像一个迪斯科球。在这些情况下,传感器很难确定哪个光束反射回来是正确的光束。你有很多假光束回来,它看起来像一个十字准线,因为你得到了很多反射。
激光焊缝跟踪无法充分跟踪铝合金金刚石板角焊缝等材料 - 接头组合。其他组合,例如带有镜面抛光的不锈钢内角,同样是非常困难的表面和接缝轨道的接头。虽然可以使用光学系统跟踪这些组合,但需要特别熟悉激光缝跟踪传感器才能重复这样做。
注:内容来源于互联网










