
3D激光焊缝跟踪系统也称为光学或视觉焊缝跟踪,它使用激光三角测量, 借助正确的软件包,3D激光跟踪可以在硬自动化和机器人系统上使用。
从概念上讲,激光焊缝跟踪是指将激光束从设备中射出,撞击表面,从表面反射,然后反射回传感器中,然后传感器拾取光束撞击的位置。 因此,通过“激光焊缝跟踪”,传感器可以知道激光发射器与相机上传感器之间的距离,从而可以对反弹的材料的位置进行三角测量。

从本质上讲,您可以获得关节的Z(高度)和Y(交叉)的图像,因此传感器知道其反弹的图像是远离传感器射线的X(距离)尺寸,并且它的特征是在整个Y方向的视野中,选择是正还是负。
激光焊缝跟踪不知道X方向或零件的长度。 这就是为什么您将设备与控制系统配合使用,然后控制系统定义X值的过程-称为校准的过程。 校准后,您的焊缝跟踪系统会在整个焊接过程中知道X、Y和Z的位置。 3D激光焊缝跟踪原理
任何针对焊接过程的焊缝跟踪解决方案都会增加周期时间,但是激光焊缝跟踪会增加最少的时间-通常每次扫描的焊缝周期约为四分之一秒。 它也可以移动最快。 光学焊缝跟踪可以达到每分钟200英寸。因此,如果需要高行进速度,它不会限制机器人或龙门架的速度。 激光焊缝跟踪还可以用于焊接以外的过程,例如胶合、喷涂和研磨。
与TAST相比,Laser具有特别的优势,因为它确实允许设备在零件上空运行或脱机查看。 诸如铁锈、水垢甚至大头钉之类的材料不一致对激光焊缝跟踪也几乎没有影响,因为跟踪完全基于零件的成像。
激光焊缝跟踪的间隙是一个限制,行进方向是另一个要考虑的因素,因为传感器必须始终引导焊接路径。 这可能会导致机器人触及问题、割炬角度问题,因此必须仔细考虑零件的工具和设计。
通常,唯一的材料激光接缝跟踪难以处理的是光泽材料。 原因是任何时候从材料发射激光时,激光都必须反射。 考虑不同的焊缝类型,以及它们如何根据材料反射激光束。 例如,在搭接处,它直接向后反射。 如果是V型焊缝,它不仅可以向后反射,而且还可以反射成相反的角度(几乎像迪斯科球一样)。 在这些情况下,传感器会费力,然后确定反射回的光束是正确的光束。 您会有很多错误的光束返回,并且看起来像是十字准线,因为您得到了很多反射。 对于这些类型的材料,关键是设备的过滤和来自控制器的路径计算可以补偿这些类型的接头/材料组合。
激光焊缝跟踪无法完全跟踪铝-金刚石板角焊缝等材料-接头组合。 其他组合,例如带有镜面涂层的不锈钢内角,同样是极其困难的表面和接缝轨道的接头。 虽然可以使用光学系统跟踪这些组合,但需要特别熟悉激光焊缝跟踪传感器才能重复进行。
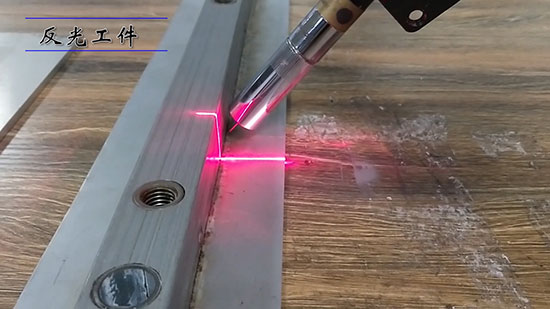
国内,创想激光焊缝跟踪系统在实时跟踪高反光工件焊接应用方面,已有成功案例。创想智控从建立初期到现在,一直深耕焊接跟踪应用并坚持自主研发和技术创新,产品已能满足大部分市场需求。如果您有考虑焊缝跟踪这方面的事项,可以与我们取得联系,若您正好属于那一小部分,也欢迎能够进一步探讨,共同寻求适合的可接受的替代性解决方案。










