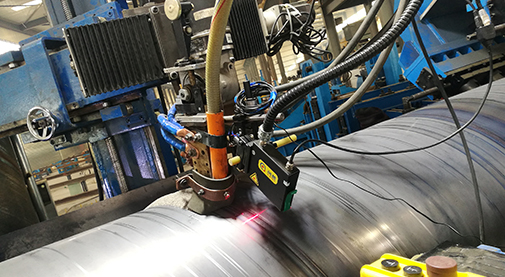
激光焊缝跟踪器采用智能实时焊缝跟踪技术、非接触式跟踪模式,通过传感器测量焊缝偏移,引导并控制焊枪精确定位,避免因工件位置偏差造成的焊接缺陷,提高生产效率及产品质量。焊缝跟踪传感器使用场景较多,有些场景干涉较多,相机需要安装的高一些避开干涉。JXB500S的安装高度达500mm,解决现场工件高低方向干涉问题。

由激光器、光学传感器和中央处理器构成,采用光学传播与成像原理,得到激光扫描区域内各个点的位置信息,通过复杂的程序算法完成对常见焊缝的在线实时检测。
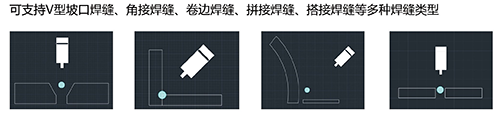
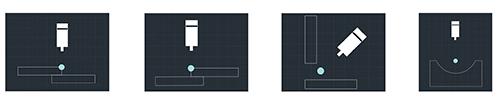
l 可一键解决检测范围、检测能力以及焊接过程中的常见问题;
l 可实现实时纠正焊缝偏差,智能实时跟踪,精确引导焊枪自动焊接;
l 可有效解决焊缝偏差带来的问题,确保焊缝成型完美。
u 可支持标准的串口与网口通讯协议。
u 可与多种机器人进行通讯,解决工件夹装偏差,组队偏差与焊接过程中的热型变。
u 适用于高低方向干涉较多的工件。
v 使焊枪处于理想位置,确保焊道连续,无急转弯。
v 减少劳动成本,提高生产效率。
v 集成度高,采集单元与运算单元一体设计。
v 有更换玻璃片装置,现场更换玻璃简单。
v 补偿生产、设备和操作公差;
v 针对复杂工件,减少编程工作;
v 实现一致的、可复现的焊接效果。
v 安装高度高,与工件干涉小。
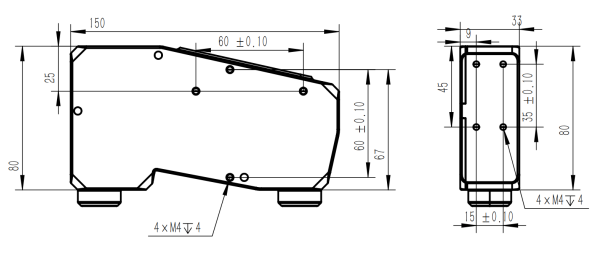
产品尺寸图及安装孔位:
CXZK-JXB500S-A(精度略低,视场较大)
CXZK-JXB500S-B(视场略小,精度较高)

CXZK-JXB500S-16

CXZK-JXB500S-25